🙋 Who am I
I am Zhuoxuan Wang, a third-year Ph.D. candidate at Southeast University, Nanjing, China, supervised by Professor Shuguo Pan.
My research interests include robot autonomous exploration, motion planning, RL-based decision making, and data-driven system identification. Additionally, I am exploring topics related to semantic recognition, VLM, and embodied intelligence.
I am also exploring the ways to work with AI agents, which is very interesting 😊. Embracing the trends, seizing the momentum!
📖 Educations
- 2021.09 — Present: Ph.D. candidate in an Integrated Master–Ph.D. Program at Southeast University, Nanjing, China. Doctoral Advisor: Shuguo Pan. Master’s Advisor: Lihui Wang.
- 2017.09 — 2021.06: B.E. in Measurement and Control Technology and Instrumentation from Harbin Engineering University.
📰 News
2026
- 2026.07.14: My latest co-authored work “C2GS-Loc: Confidence Guided Gaussian Splatting Map for Visual Localization” has been submmited to IEEE Transactions on Automation Science and Engineering (TASE).
- 2026.07.06: My latest work “SEKIRO: A Structure-Enhanced and Koopman-Integrated Deep Reinforcement Learning Framework for Robot Exploration” has been submmited to IEEE Transactions on Industrial Informatics (TII).
- 2026.06.28: My co-first author work entitled “PACE: Passability and Memory Integrated Exploration for UAVs in Large-scale and Cluttered Environments” has been acceped by IEEE Robotics and Automation Letters (RAL) 🎉🎉.
- 2026.05.28: I have officially received funding from CSC and expect to start my visiting in Sapienza University of Rome in 2026.09 🎉🎉.
- 2026.05.10: My latest co-authored work “A Novel LiDAR-Inertial Integrated Implicit Localization Framework via Uncertainty-Aware Scene Coordinate Regression” has been submmited to IEEE Transactions on Industrial Informatics (TII).
- 2026.03.23: The work co-authored with my collaborator Aohua Liu entitled “Learning Physics-Aware Sensorimotor Model with Visual-Tactile Sensing for Deformable Linear Object Manipulation” has been accepted by IEEE/ASME Transactions on Mechatronics (T-MECH) 🎉🎉.
- 2026.02.01: My work entitled “TIPS: Tiered Information-Rich Planning Strategy for Efficient AGV Autonomous Exploration” published on IEEE Robotics and Automation Letters (RAL) has been transferred to and accpeted by IEEE International Conference on Robotics and Automation (ICRA) 2026, Vienna 🎉🎉.
- 2026.01.19: My co-authored work entitled “Hierarchical active path-planning based on edge-and-corner region guidance for unmanned platform” has been acceped by Chinese Journal of Scientific Instrument 🎉🎉.
- 2026.01.04: My work entitled “Data-driven Modeling with Deep Koopman Operator for Robust Path Tracking of Autonomous Vehicles” has been acceped by IEEE Transactions on Industrial Electronics (TIE) 🎉🎉.
2025
- 2025.12.01: I have received an invitation from Sapienza University of Rome for a one-year CSC visiting program (2026.09 — 2027.10).
My host professor will be Daniele Nardi.
My research topic will focus on semantic exploration and navigation for humanoid robots. - 2025.10.16: Our paper entitled “TIPS: Tiered Information-Rich Planning Strategy for Efficient AGV Autonomous Exploration” has been acceped by IEEE Robotics and Automation Letters (RAL) 🎉🎉.
- 2025.05.06: I have been awarded the “Postgraduate Research&Practice Innovation Program of Jiangsu Province” (2025.05 — 2028.09).
📝 Publications
🔹 Student First Author († indicates equal contribution)
SEKIRO: A Structure-Enhanced and Koopman-Integrated Deep Reinforcement Learning Framework for Robot Exploration (Under Review)
IEEE Transactions on Industrial Informatics (Q1, IF=9.9), 2026.
 [Paper]
[Paper]
 [Project Page]</a>
[Project Page]</a>
 [Video]
[Video]
PACE: Passability and Memory Integrated Exploration for UAVs in Large-scale and Cluttered Environments.
IEEE Robotics and Automation Letters (Q1, IF=5.3), 2026.
[Paper]
[Project Page]
[Video]
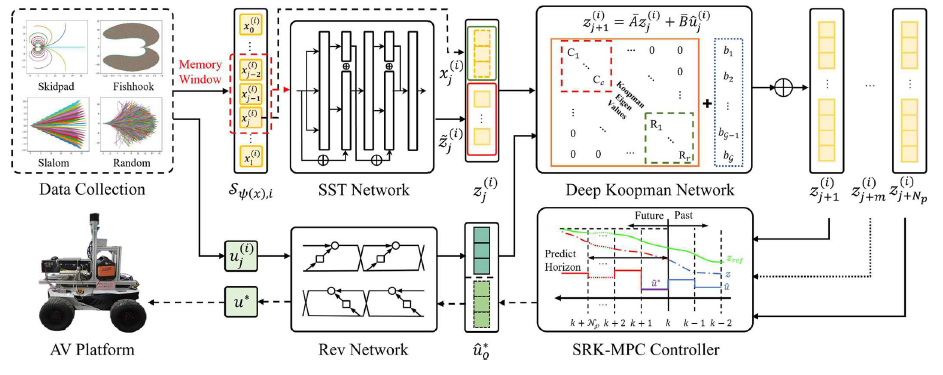
Data-driven Modeling with Deep Koopman Operator for Robust Path Tracking of Autonomous Vehicles
IEEE Transactions on Industrial Electronics (Q1, IF=7.2), 2026.
[Paper]
[Project Page]
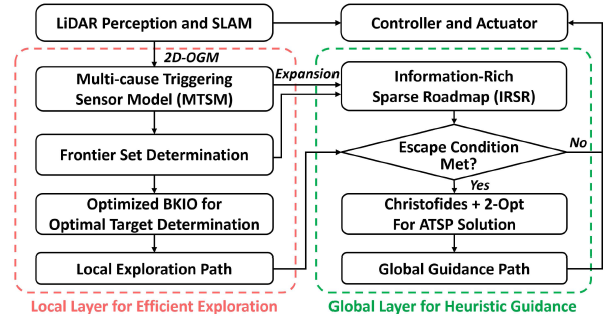
TIPS: Tiered Information-Rich Planning Strategy for Efficient UGV Autonomous Exploration
IEEE Robotics and Automation Letters (Q1, IF=5.3), 2025 && IEEE ICRA 2026.
[Paper]
[Project Page]
[Video]
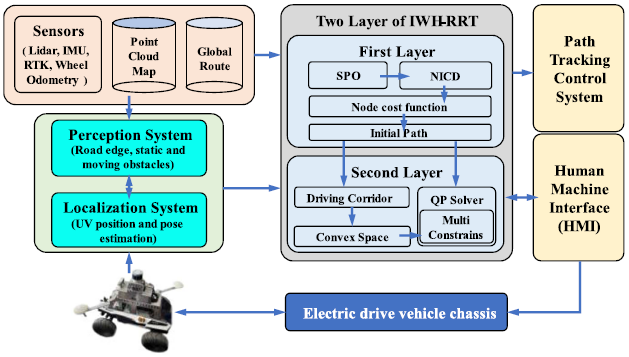
A Path Planning Framework Based on an Improved Weighted Heuristic RRT and Optimization Strategy
IEEE Transactions on Intelligent Vehicles (Q1, IF=14.3), 2023.
[Paper]
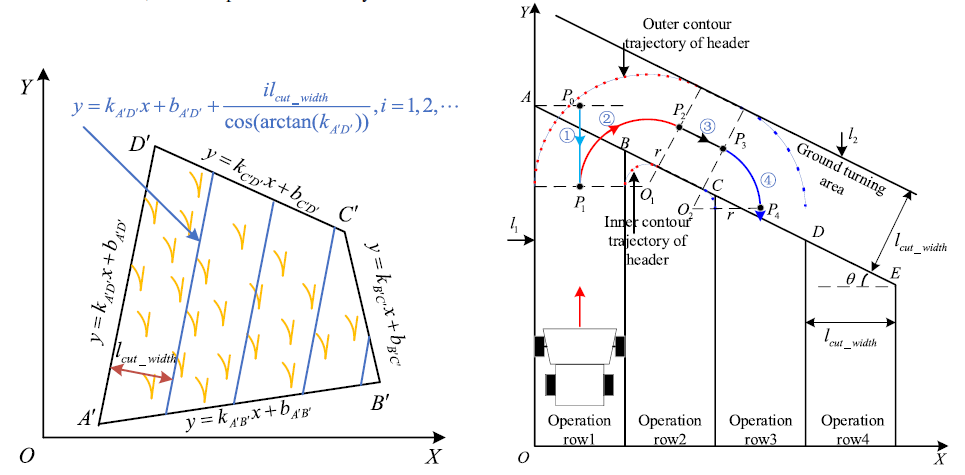
Full Coverage Path Planning Methods of Harvesting Robot with Multi-Objective Constraints
Journal of Intelligent & Robotic Systems (Q3, IF=2.8), 2022.
[Paper]
🔸 Co-author
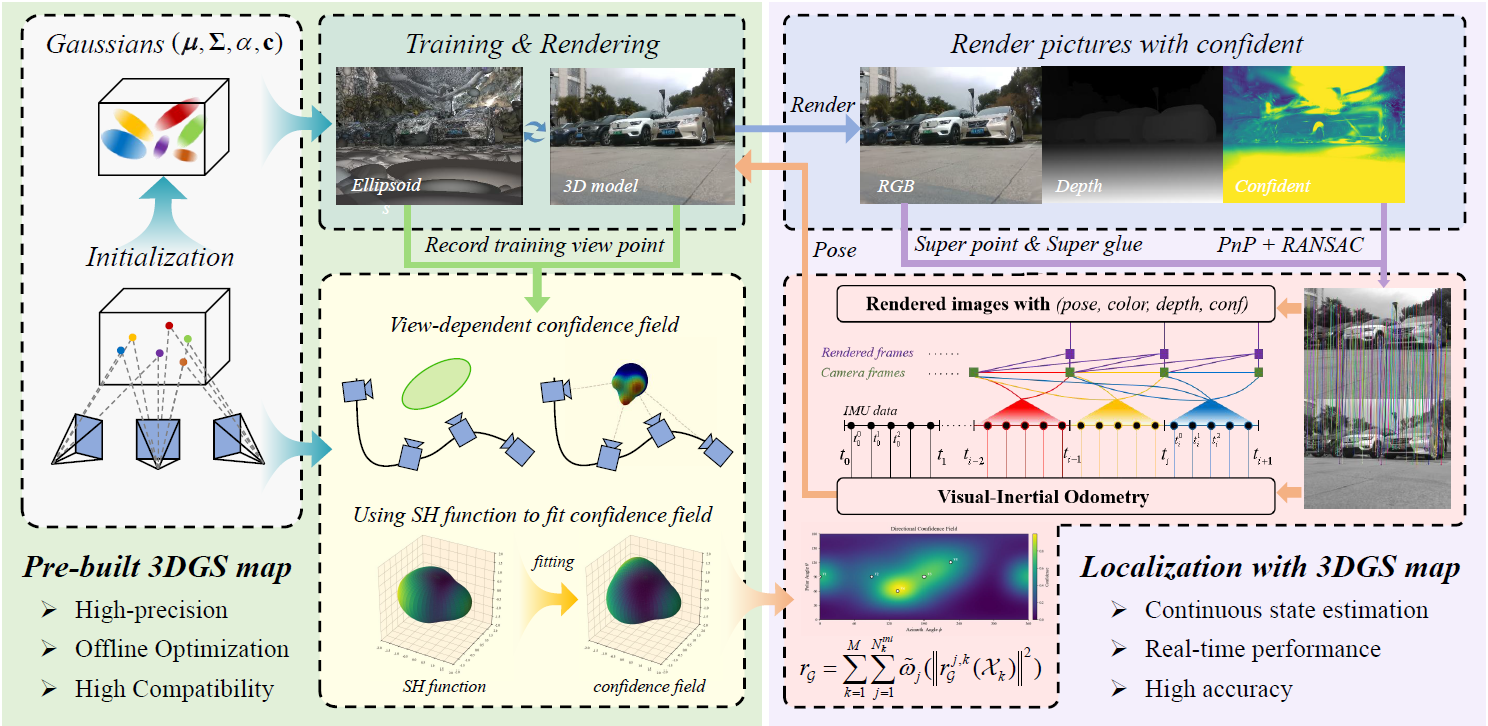
C2GS-Loc: Confidence Guided Gaussian Splatting Map for Visual Localization (Under Review)
IEEE Transactions on Automation Science and Engineering (Q1, IF=7.9), 2026.
[Paper]
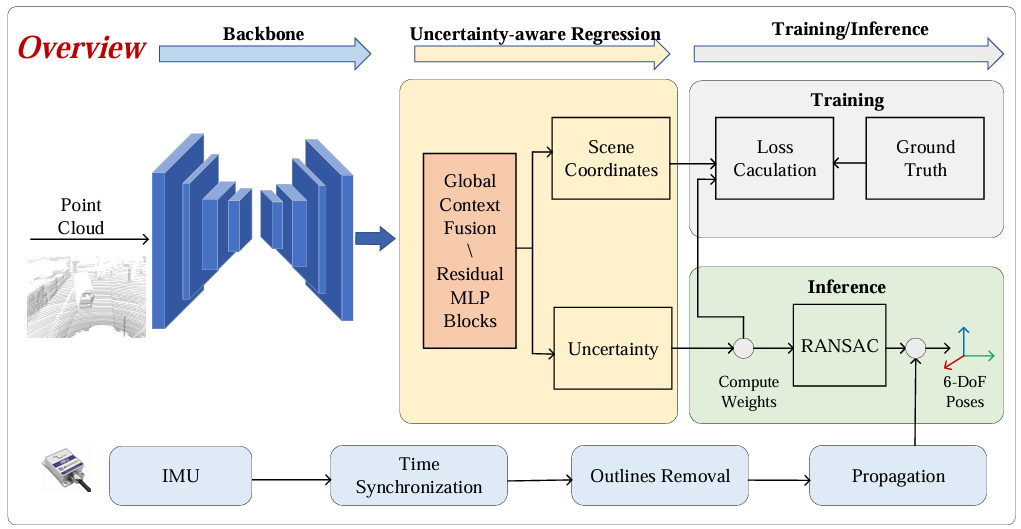
A Novel LiDAR-Inertial Integrated Implicit Localization Framework via Uncertainty-Aware Scene Coordinate Regression (Under Review)
IEEE Transactions on Industrial Informatics (Q1, IF=9.9), 2026.
[Paper]
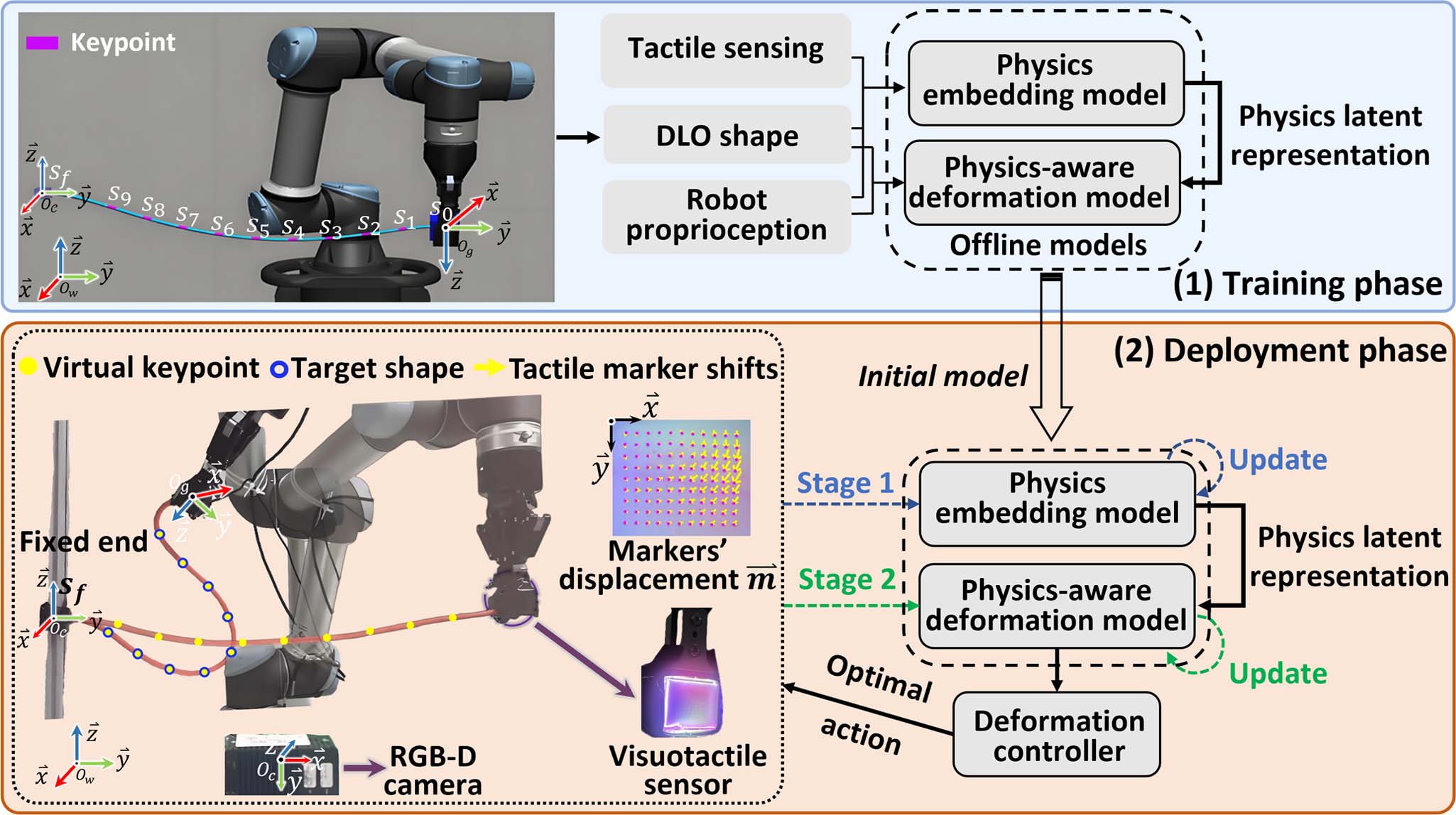
Learning Physics-Aware Sensorimotor Model with Visual-Tactile Sensing for Deformable Linear Object Manipulation
IEEE/ASME Transactions on Mechatronics (Q1, IF=7.3), 2026.
[Paper]
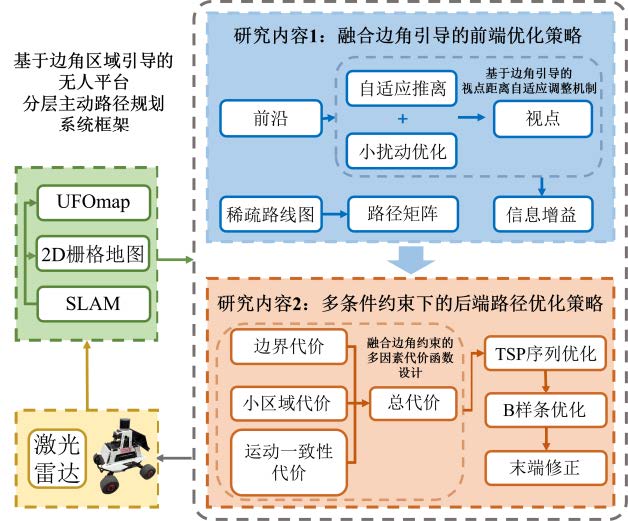
Hierarchical active path-planning based on edge-and-corner region guidance for unmanned platform.
Chinese Journal of Scientific Instrument (EI), 2026.
[Paper]
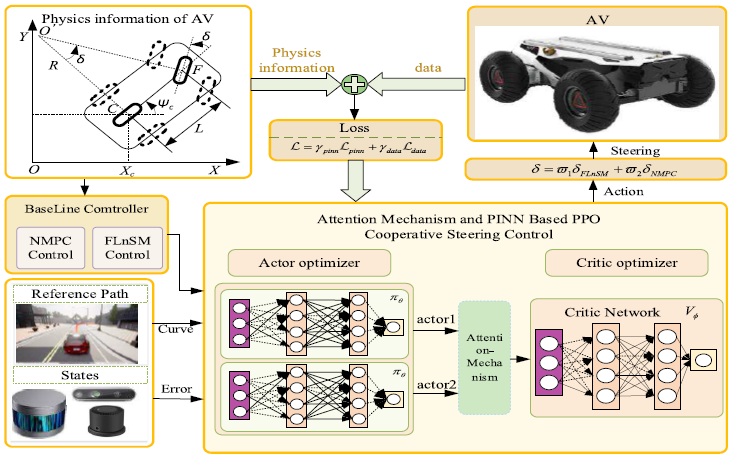
Fusion Control Tracking Strategy for Autonomous Vehicles: A Fast PPO Reinforcement Learning Based on Attention Mechanism and Physical
IEEE Transactions on Intelligent Transportation Systems (Q1, IF=8.4), 2025.
[Paper]
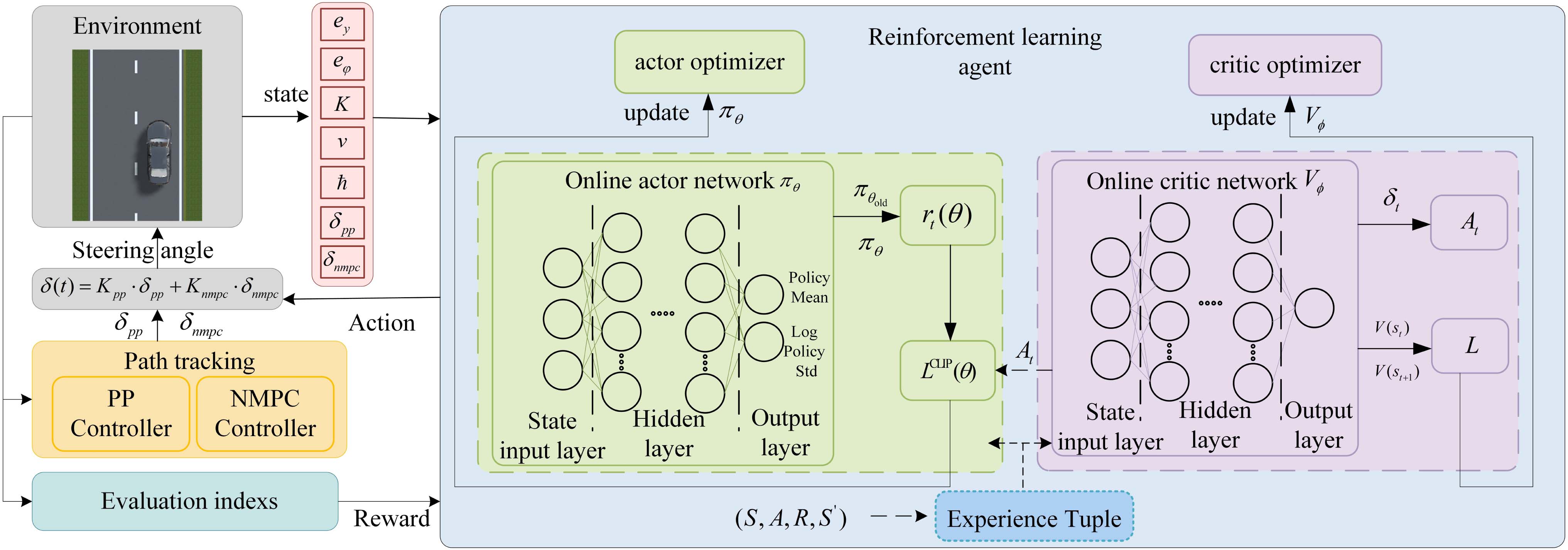
A Fast PPO Reinforcement Learning Based on Attention Mechanism and Physical Information
IEEE Robotics and Automation Letters (Q1, IF=5.3), 2025.
[Paper]
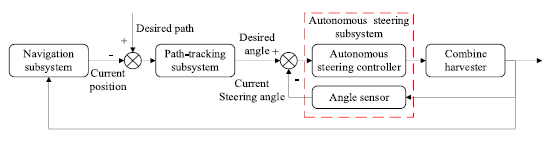
The sliding mode controller with improved reaching law for harvesting robots Constraints
Journal of Intelligent & Robotic Systems (Q3, IF=2.8), 2022. [Paper]
🎖 Honors and Awards
- 2025.10: Third-Class Scholarship for Doctoral Students of Southeast University (¥10,000).
- 2023.10: Outstanding Student of Southeast University.
- 2022.11: National Scholarship (¥20,000).
- 2022.09: Individual Advanced in Academic Transcript of Southeast University.
- 2022.09: First-Class Scholarship for Postgraduate Students of Southeast University (¥12,000).
- 2021.09: Second-Class Scholarship for Postgraduate Students of Southeast University (¥10,000).
- 2018.05 — 2020.11: First-Class Scholarship for Undergraduate Students of Harbin Engineering University ×6 (¥400).
🔧 Interesting Tools Developed with AI Agents
I have mainly used Claude Code and Cursor, and currently have developed two projects with the help of AI agents:
- OpenClaw Virtual Machine Isolation Installation Guide [Project page]
A detailed OpenClaw virtual machine isolation installation guide designed specifically for running OpenClaw through VirtualBox on Ubuntu 24.04 hosts. It includes detailed steps, precautions, and is very suitable for users who want to use OpenClaw on Ubuntu but are concerned about contaminating local files.
(Based on this guidance, I have configured two 🦐 workers on my Feishu app for paper summary and daily AI news organization) 😀. - ArXiv Paper Crawler [Project page]
Forked from RayeRen’s project, added daily automated crawling, daily report generation, and the function of summarizing papers by specific authors.
🏃 Activities
- 2026.06: Attending the IEEE International Conference on Robotics and Automation (ICRA) 2026 at Vienna, Austria (Poster).
- 2025.10: Attending the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 at Hangzhou, China.
- 2024.11: Attending the Autonomous Robotic Technology Seminar (ARTS) 2024 at Shenzhen, China.
✒ Peer Review Services
- Reviewer of IEEE T-IE, IEEE RA-L.
🤝 Collaborators
- Aohua Liu, Ph.D. candidate in the School of Automation, Southeast University, Nanjing, China.
- Yuxiang Gao, Master student in the School of Instrument Science and Engineering, Southeast University, Nanjing, China.
- Jinle Xu, Ph.D. candidate in the School of Instrument Science and Engineering, Southeast University, Nanjing, China.
- Hong Liu, Ph.D. candidate in the School of Instrument Science and Engineering, Southeast University, Nanjing, China.